
购买该报告请联系:
麦姆斯咨询 王懿
电话:17898818163
电子邮箱:wangyi#memsconsulting.com(#换成@)
从四个维度深度剖析激光雷达核心技术
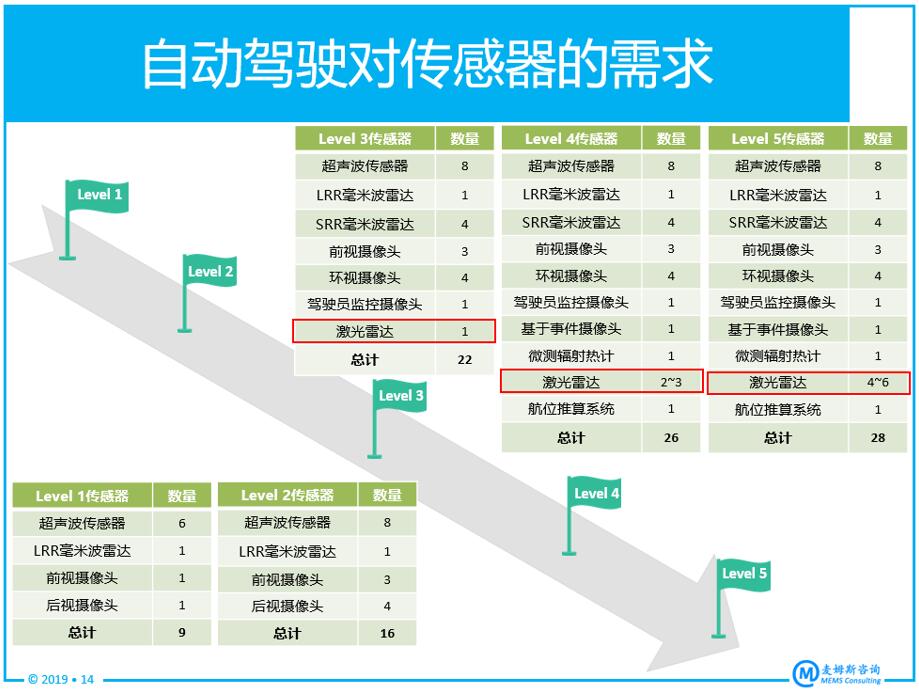
激光雷达(LiDAR)的产业化热潮来源于自动驾驶汽车的强烈需求。在美国汽车工程师学会(SAE)定义的L3级及以上的自动驾驶汽车之中,作为3D视觉传感器的激光雷达彰显了其重要地位,为自动驾驶的安全性提供了有力保障。因此,激光雷达成为了产业界和资本界追逐的“宠儿”,投资和并购消息层出不穷。很多老牌整车厂和互联网巨头都展开了车载激光雷达的“军备竞赛”。近期,MEMS激光雷达技术发展最为活跃,并且吸引了大多数投资,同时宝马宣布将于2021年推出集成MEMS激光雷达的自动驾驶汽车。
(数据来源:Yole)
伴随着自动驾驶热度上升,激光雷达相关新闻铺天盖地袭来。但是这项在自动驾驶领域尚不成熟的3D视觉技术,不仅公开技术资料稀缺,而且企业和媒体关于各种激光雷达的分类和称谓表达五花八门,例如:机械式、固态、全固态、混合固态;又如:MEMS(微机电系统)、OPA(光学相控阵)、Flash(闪光);亦如:FMCW(调频连续波)、脉冲波;还如:飞行时间法、三角测距法等。这些称谓常常让圈内圈外的人士感到困惑。不用担心,麦姆斯咨询为您答疑解惑,本报告从“测距原理、光源、光束操纵、探测器”四个维度对激光雷达核心技术及分类进行了分析,力求让读者对激光雷达错综复杂的技术脉络有清晰的认知。
当我们在交流“直接/间接飞行时间法、三角测距法”等概念时,这实际上是激光雷达的“测距原理”维度;而谈及“机械式、MEMS、OPA、Flash”等关键词时,这属于激光雷达的“光束操纵”维度;无论是905nm还是1550nm的波长,还是边发射激光器(EEL)或垂直腔面发射激光器(VCESL),这是从激光雷达的“光源”维度交流问题;而涉及PIN、APD(雪崩光电二极管)/SPAD(单光子雪崩二极管)、SiPM(硅光电培增管),或是单点、线阵、面阵,则是从激光雷达的“探测器”维度分析技术。
掌握不同类型激光雷达技术路线及“硬核”
按照光束操纵方式分类,激光雷达主要分为机械式激光雷达、MEMS激光雷达、OPA激光雷达和Flash激光雷达。观察目前产业发展情况,MEMS和Flash技术更受到激光雷达厂商的青睐,有望逐步取代机械式激光雷达。本报告详细分析了上述四种激光雷达的工作原理、优劣势;并对各种激光雷达技术的“硬核”——核心元器件的原理、工艺难度和主要供应商进行了深度剖析,包括MEMS微镜、OPA芯片、ToF(飞行时间)图像传感器、激光器(EEL/VCSEL)、光电探测器(APD/SPAD/SiPM)等;最后还梳理了各种激光雷达的国内外典型厂商。
MEMS微镜作为MEMS激光雷达的核心元器件,毫米级尺寸大大减少了激光雷达的体积,帮助系统摆脱了笨重的马达等机械式装置;同时,MEMS微镜的引入大大减少激光器和探测器数量,极大地降低整体成本;在投影显示领域商用化应用多年的经历及近期在汽车领域的努力,让业界对MEMS微镜的成熟度更为认可。但是,MEMS微镜尺寸的缩小又限制了MEMS激光雷达的光学口径、扫描角度,视场角也会变小;如何通过车规也是MEMS微镜面临的巨大挑战。
OPA激光雷达无需任何机械部件就可以实现对光束的操纵,曾一度被业界看好。但核心元器件——OPA芯片的纳米加工难度非常高。以Quanergy为代表的OPA激光雷达厂商不断修正其产品的量产时间和最远测距范围。那么OPA芯片的实现方式有哪些?面临哪些方面的问题?您将在本报告中找到答案。
Flash激光雷达被视为最终的主流技术路线。Flash激光雷达技术利用激光器同时照亮整个场景,如何提高接收端每个像素可接收的能量,从而实现远距离探测,这对线阵/面阵探测器技术提出了极高要求。本报告对线性雪崩二极管(LMAPD)阵列、盖革模式雪崩二极管(GMAPD)阵列、硅光电倍增管(SiPM)、ToF图像传感器等阵列探测器的工作原理、关键参数进行了详细分析,并梳理了国内外相关厂商信息。
FMCW激光雷达另辟蹊径:测距又测速
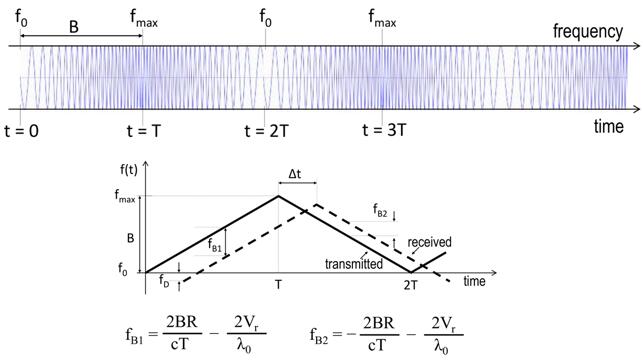
调频连续波(FMCW)激光雷达采用基于光源频率调制的间接飞行时间法,通过比较任意时刻反射信号频率与此时刻发射信号频率的之差方法来得到目标的距离信息。该激光雷达类型与上述四种激光雷达(按照光束操纵方式分类)不一样,是从光源波形角度进行分类的。FMCW激光雷达的光源信号调制主要包括三角波调制、锯齿波调制、正弦波调制等方式。由于正弦波调制检测物体时需要调节信号频偏,大多应用于只有一个探测目标的情况,比如高度计。如果希望FMCW激光雷达检测多个目标的距离和速度等信息,通常采用三角波调制。
FMCW激光雷达采用相干测量技术。相干测量又称光外差探测。激光器发出的光经分束器后分为两束,一束作为本振光,另一束在调制后经光学系统照射到目标物体上,反射回来的光(信号光),与本振光在光电探测器上混频。相干测量具有转换增益高、获得光信号全部信息(振幅、频率、相位)、对背景光滤波性能高、可探测微弱信号等优势。在相干测量中,为了获得最佳的信噪比,需要足够高的本振光功率,这对激光器的要求非常高(窄线宽激光频率线性调谐),同时也需要平衡光电探测器。平衡光电探测器利用在同一探测系统中放置两组探测器件,分别将本振光和信号光输入到光电二极管中,将光信号转化为电信号,然后经过减法器运算,输出外差信号。通过本报告,您会对FMCW激光雷达技术及核心元器件(平衡光电探测器)有更深入的认识。
报告目录:
‐ 缩写列表
‐ 自动驾驶概述
‐ 激光雷达综述
* 定义
* 发展历史
* 产业链
* 四个维度
* 测距原理
* 光束操纵
* 光源
* 探测器
* 主要指标
‐ 机械式激光雷达技术及应用
* 工作原理
* 优劣势分析
* 难点分析
* 主要国际厂商
* 主要国内厂商
‐ MEMS激光雷达技术及应用
* 工作原理
* 优劣势分析
* 实现和构成
* 核心元器件:MEMS微振镜
* 主要国际厂商
* 主要国内厂商
‐ OPA激光雷达技术及应用
* 工作原理
* 优劣势分析
* 核心元器件:OPA芯片
* 主要国际厂商
* 主要国内厂商
‐ Flash激光雷达技术及应用
* 工作原理
* 优劣势分析
* 核心元器件:激光器
* 核心元器件:探测器
* 主要国际厂商
* 主要国内厂商
‐ FMCW激光雷达技术及应用
* 工作原理
* 优劣势分析
* 核心元器件:平衡光电探测器
* 主要国际厂商
* 主要国内厂商
‐ 关于麦姆斯咨询
若需要购买《激光雷达技术及核心元器件-2019版》报告,请发E-mail:wangyi#memsconsulting.com(#换成@)。
